
Robot Overview
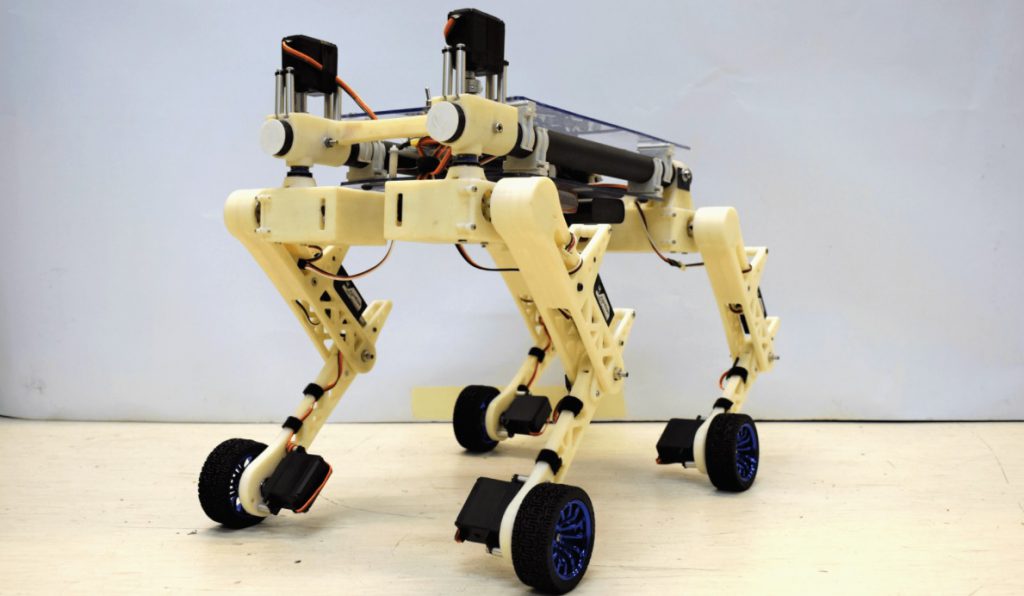
The hybrid robot incorporates a number of actuation technologies and materials. The robotis based on a standard quadruped design, extended in a way to include actuatedwheels at its toes. It features four two-segment 3D printed legs and a lightweightbody frame consisting of 3D printed parts and two carbon fibre tubes as shownin Fig.1. The 3D printer filament used is Acrylonitrile Butadiene Styrene (ABS)plastic due to its good mechanical properties and popularity as a printing ma-terial. The design is modular, in a way that several design parameters can bemodified and that the effect each one has on its capabilities can be observed(payload capacity, stability, etc). Modules can also be added or removed (dif-ferent microcontrollers, sensors, etc). Most of the parts are designed so they canbe built using a 3D Printer and most of the components can be bought at ahobby store.
Locomotion Experiments
References
Zournatzis, I., Koutsoukis, K., Machairas, K., Kecskeméthy, A., and Papadopoulos, E., “Maera: A Hybrid Wheeled-Legged Robot designed for Research and Education,” 11th International Conference on Robotics in Education (RiE), Bratislava, Slovakia, April 22-24, 2020.