
Laelaps was a Greek mythological dog who never failed to catch what she was hunting. It is casted into the stars, by Zeus, as the constellation Canis Major. Team's logo is inspired by the symbol of the constellation.

Recent Work
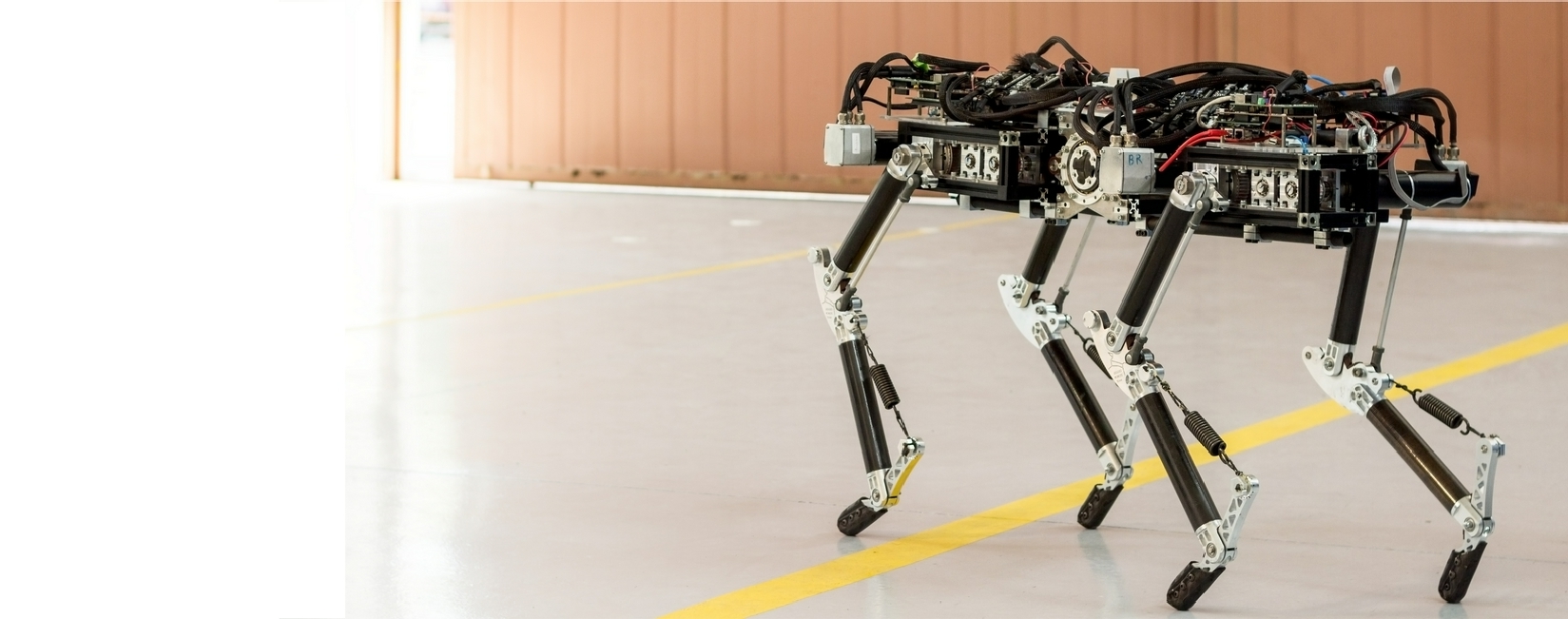
Our recent work focuses on the design, development and control of legged systems that move with efficiency, agility and speed. Custom made optimal actuators have been designed and manufactured to enable capabilities close to those of quadruped animals. Optimal planners and controllers have been also designed to drive our robots in such unpredictable environments.


