
Design and assembly of the SAHR monopod
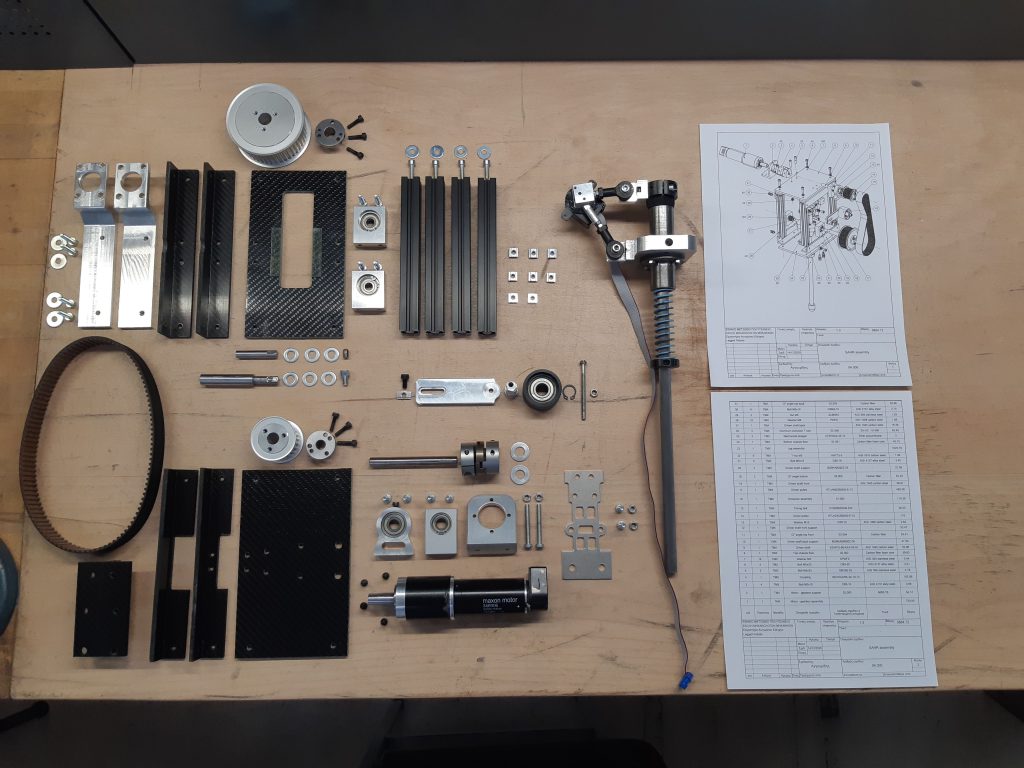




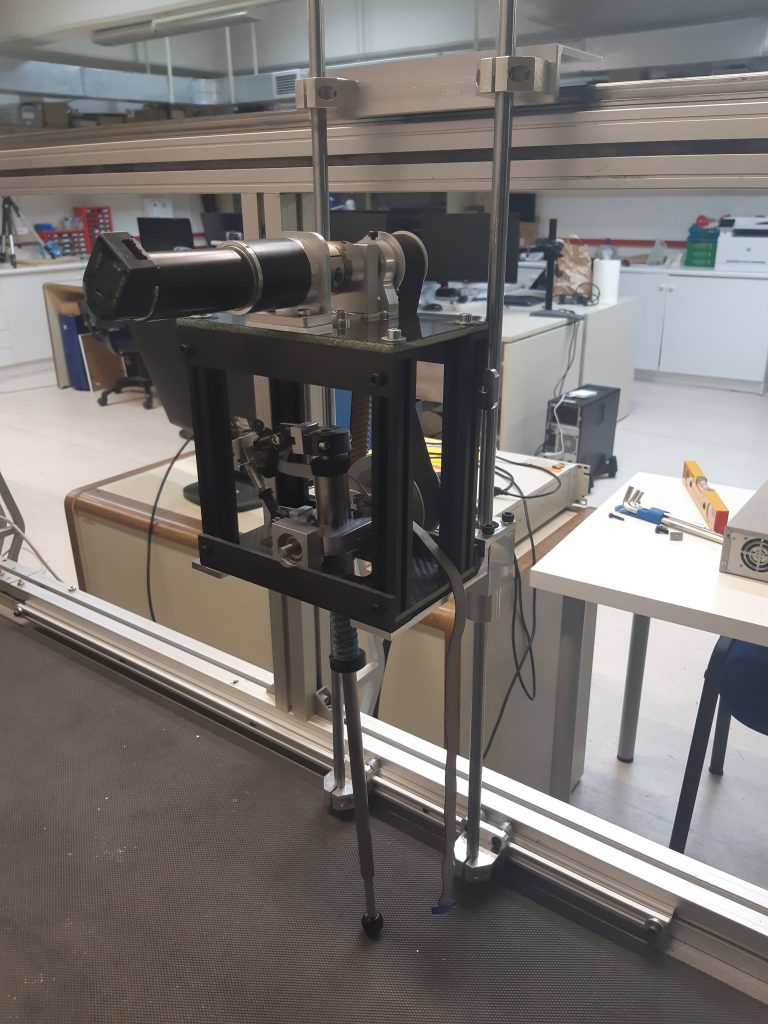

Single Actuated Hopping Robot (SAHR)
2D simulation of a single-legged robot with a controller for regulating both the forward speed and the apex height of a one legged hopping robot, using only a single actuator. The control method is based on a dynamic model of the hopping robot and makes use of the dynamic coupling of the vertical and forward motions of the robot. The control is applied first to a simulated model of the robot and shown to track a desired forward robot speed and a desired apex height.
SAHR force sensing
Single Actuated Hopping Robot (SAHR)
Hopping experiment – Comparison with Gazebo Simulation