|
|
|
|
|
||||||
|
Quadruped animals show incredible motion capabilities in terms of speed, agility and energy efficiency. By employing dynamically stable motion gaits, they are able to achieve high speeds, while by adapting the stiffness of their muscles they are able to maintain their stability and desired motion. Observing the motion of animals such as the cheetah, one can easily notice the enormous bending of its flexible spine during high speed motion, the use of stiffened articulated legs, and the stabilization of its motion using its tail. Researchers have been intrigued by these phenomenal characteristics since more than thirty years. Today, innovative research on legged locomotion is renewing itself vigorously, attracting scientists and engineers alike. |
The development of legged robots with capabilities close to those of animals opens new and valuable possibilities, such as reaching distant points through rough or slopped terrains, detecting survivors in earthquake ruins or workers in mine tunnels, helping in fire-fighting or de-mining tasks, or even exploring planets. This research program aims at advancing the state of the art in legged locomotion and more specifically in efficient and agile quadruped locomotion through the development of novel designs and control methods. The goal of achieving efficiency, high-speed, robustness and versatility in quadruped robots is today feasible and will be pursued vigorously within the framework of this program. |
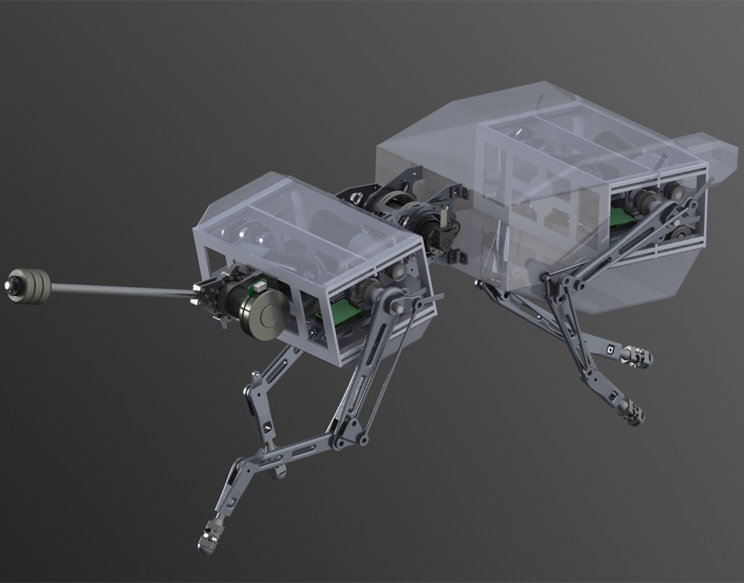
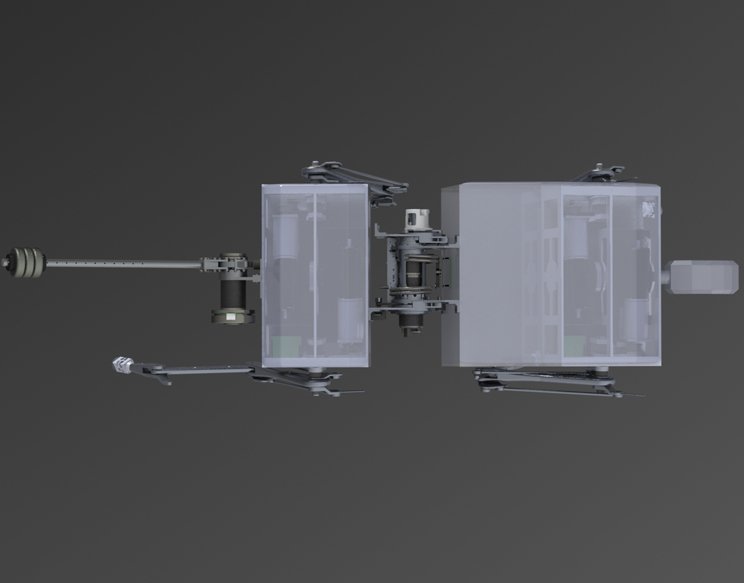
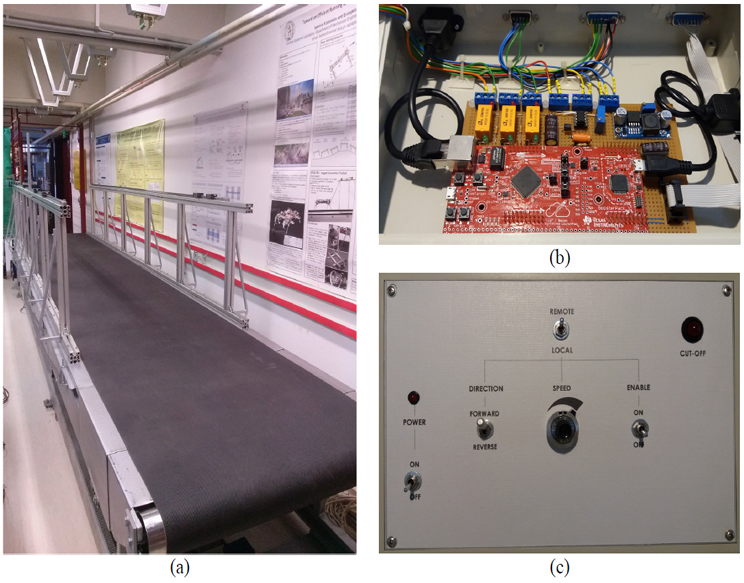
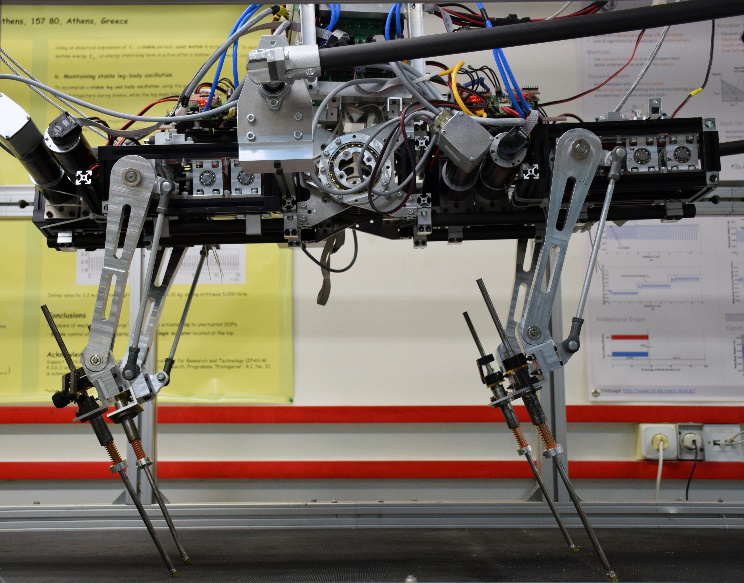
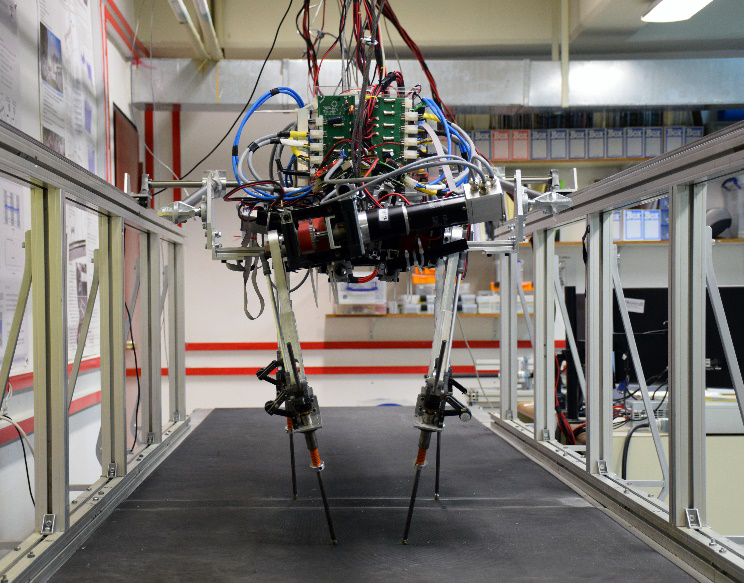
This program includes analytical, simulation and experimental thrusts. The analytical work focuses on spatial dynamic modelling and passive dynamics analysis of highly articulated, variable compliance quadrupeds, and on robust nonlinear control methods for achieving given speeds in traversing known but varying environments, with stability and efficiency. A simulation environment provides a virtual testbed for testing alternative algorithms and designs. Finally, the experimental work focuses on designing and developing a novel quadruped robotic system, capable of demonstrating the validity of the analytical results and achieving efficiently high speeds |
||||||
|
|
|
|
||||||
|
|
|
|||||||