![]()
Preliminary Space Robot Emulator Hovering over the Granite Table
Sarcos Master-slave telerobotic system
![]()
Preliminary Space Robot Emulator Hovering over the Granite Table

HAAS Minimill Machining Center
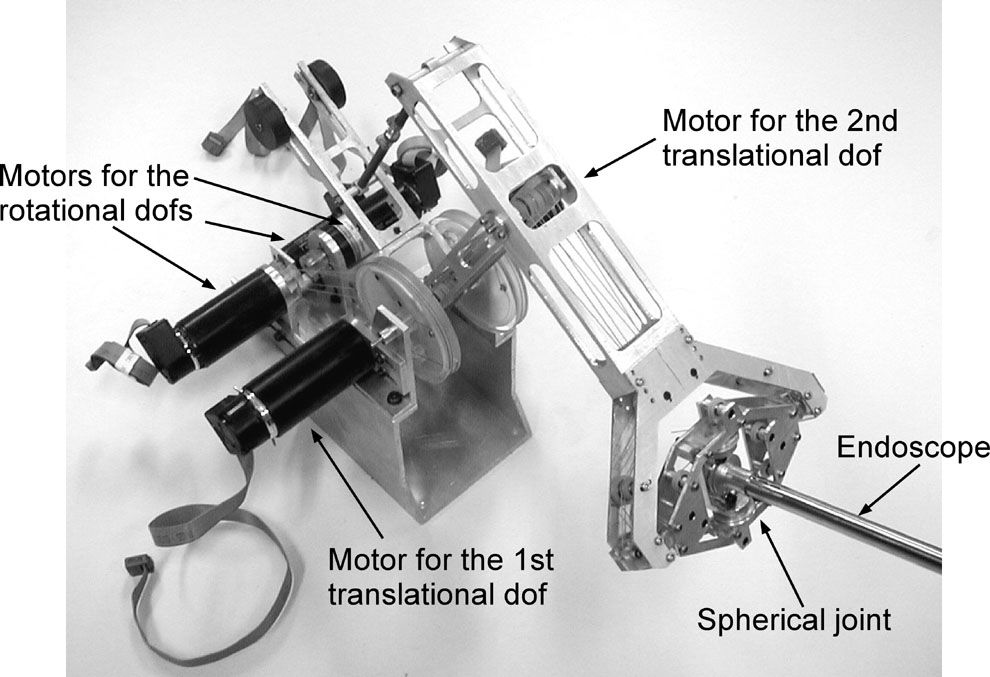
Five (5) dof haptic interface and simulator
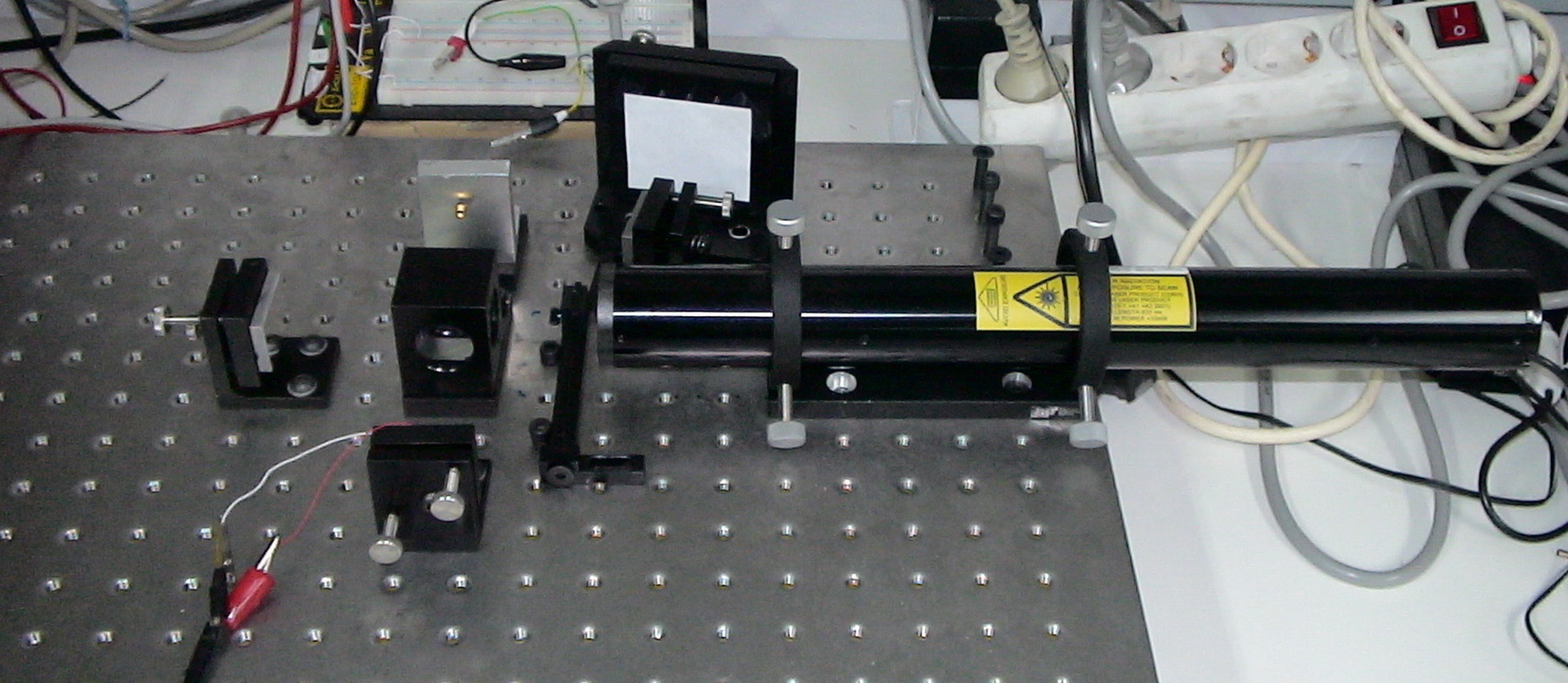
Laser Interferometer (300nm)
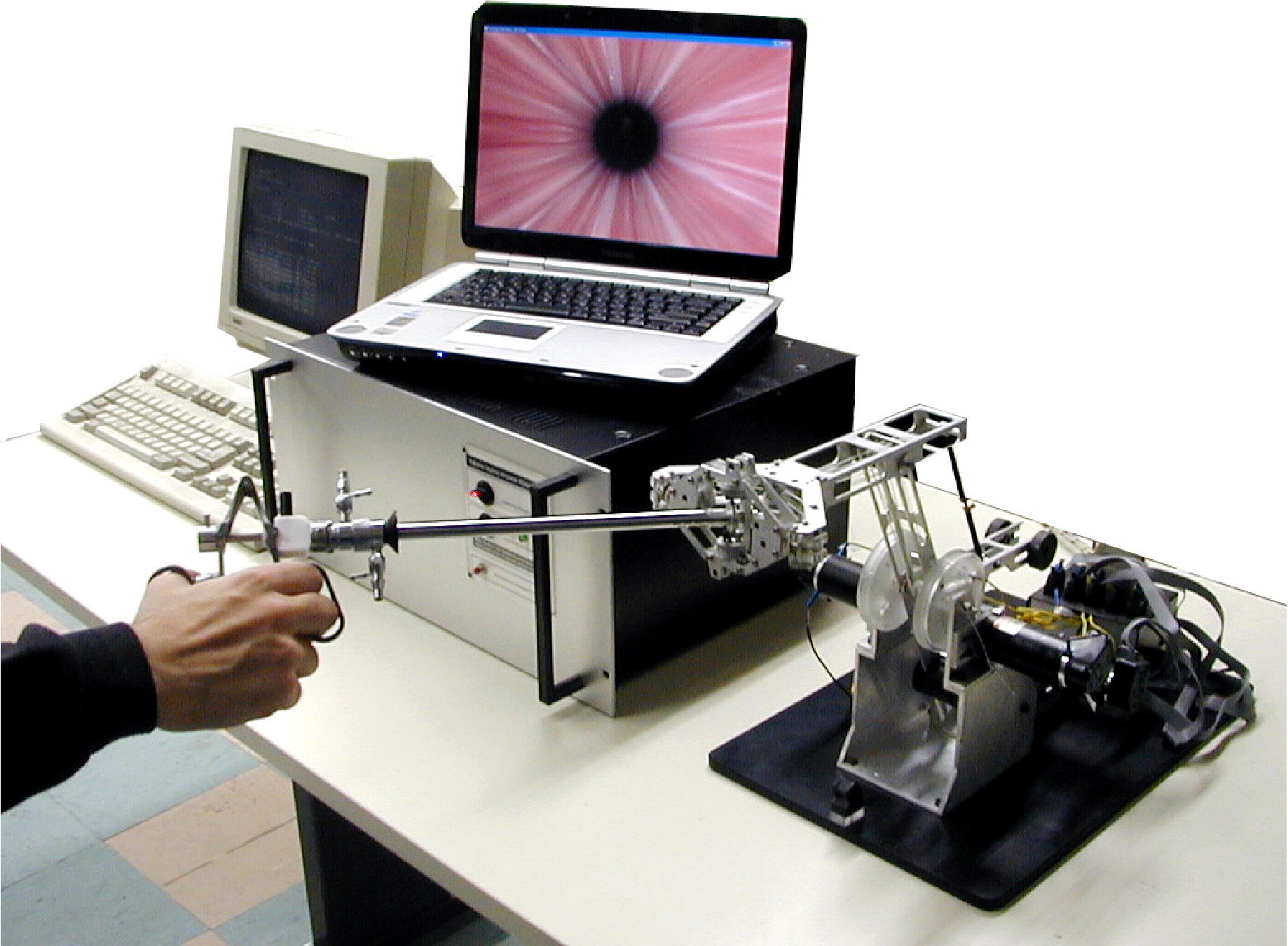
Five (5) dof haptic interface and simulator
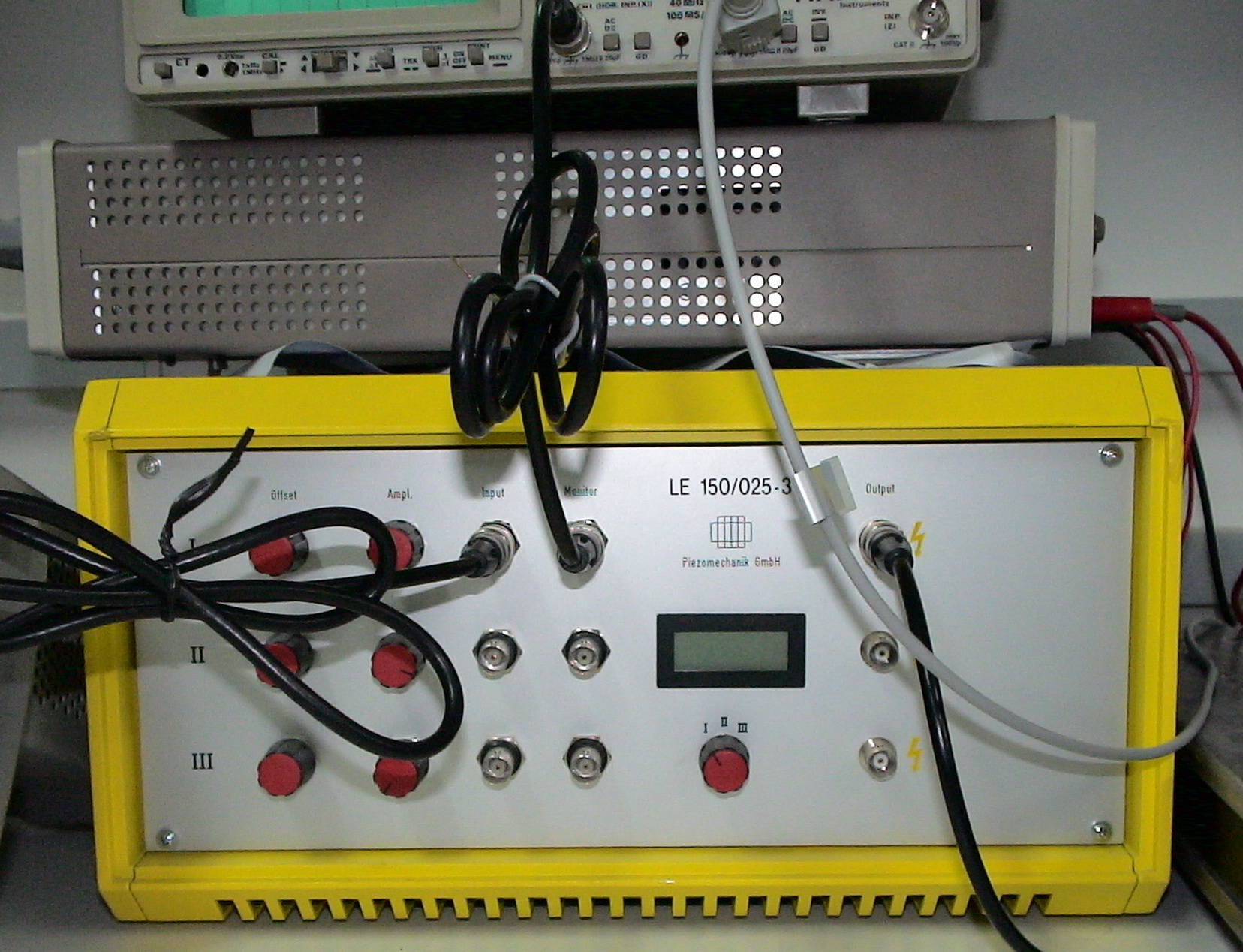
PZT Amplifier
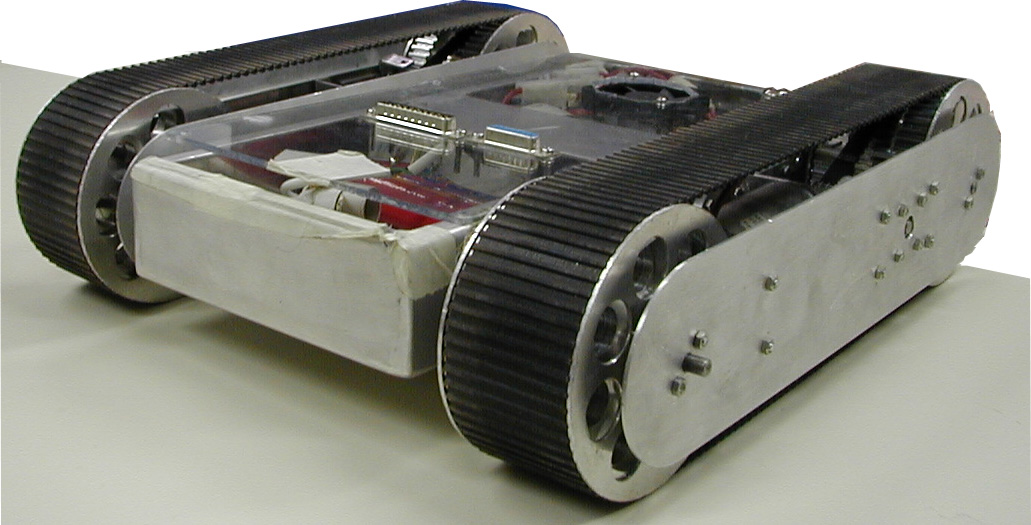
Hercules Robotic platform

Video microscope
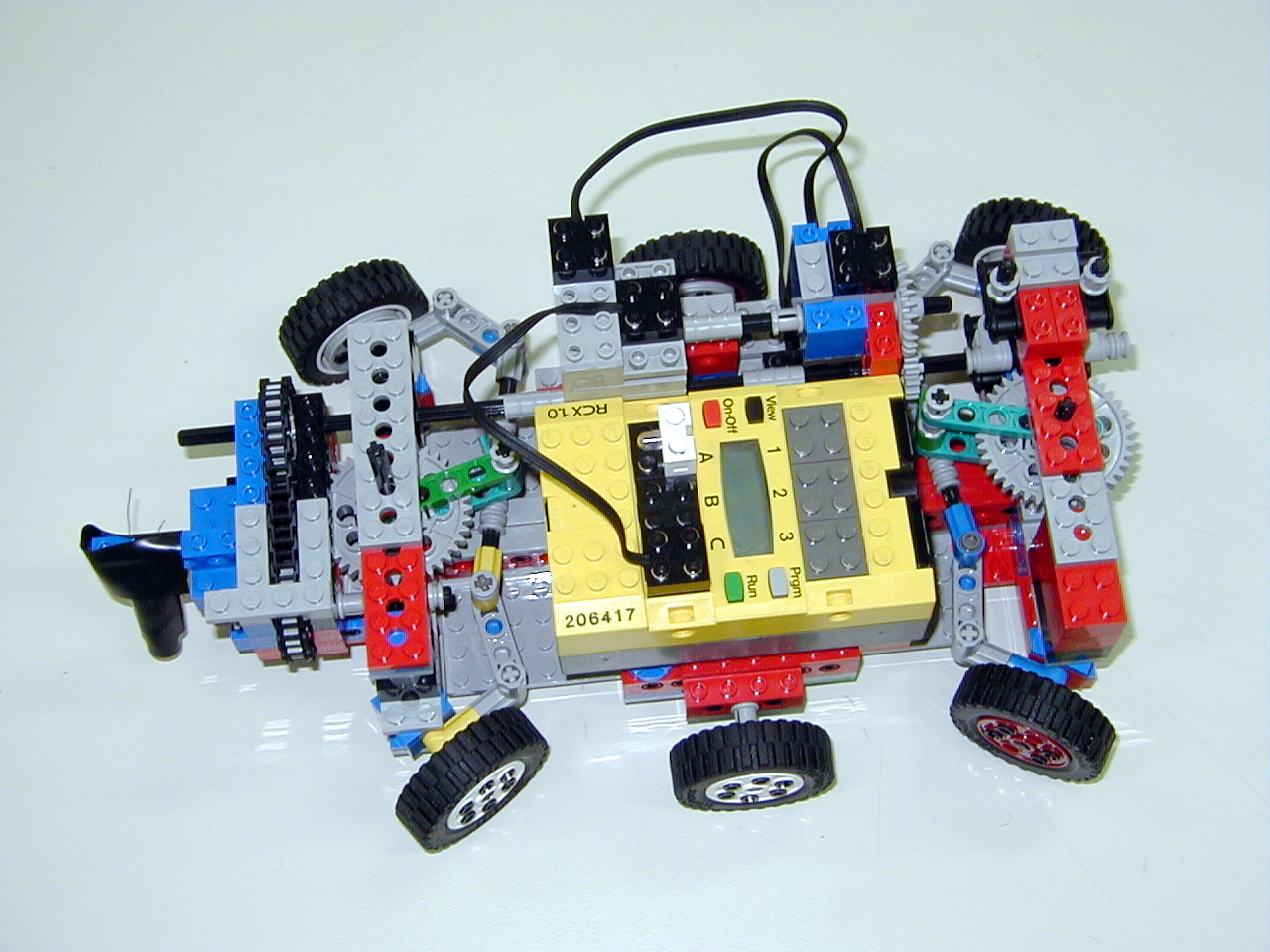
Lego Robots
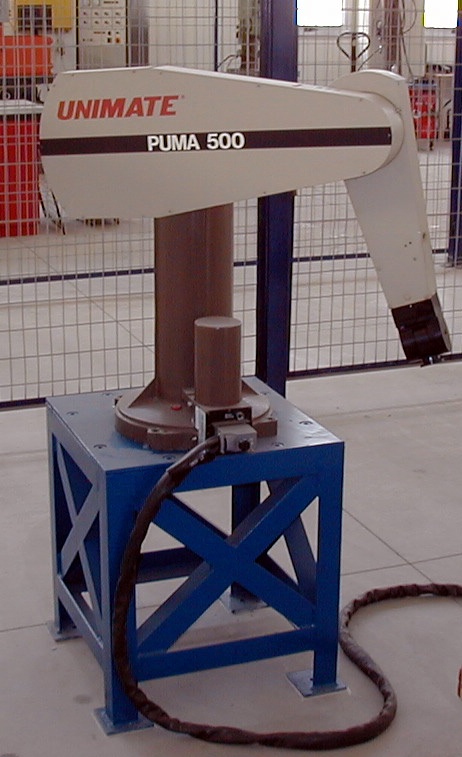
Puma 500 Robot
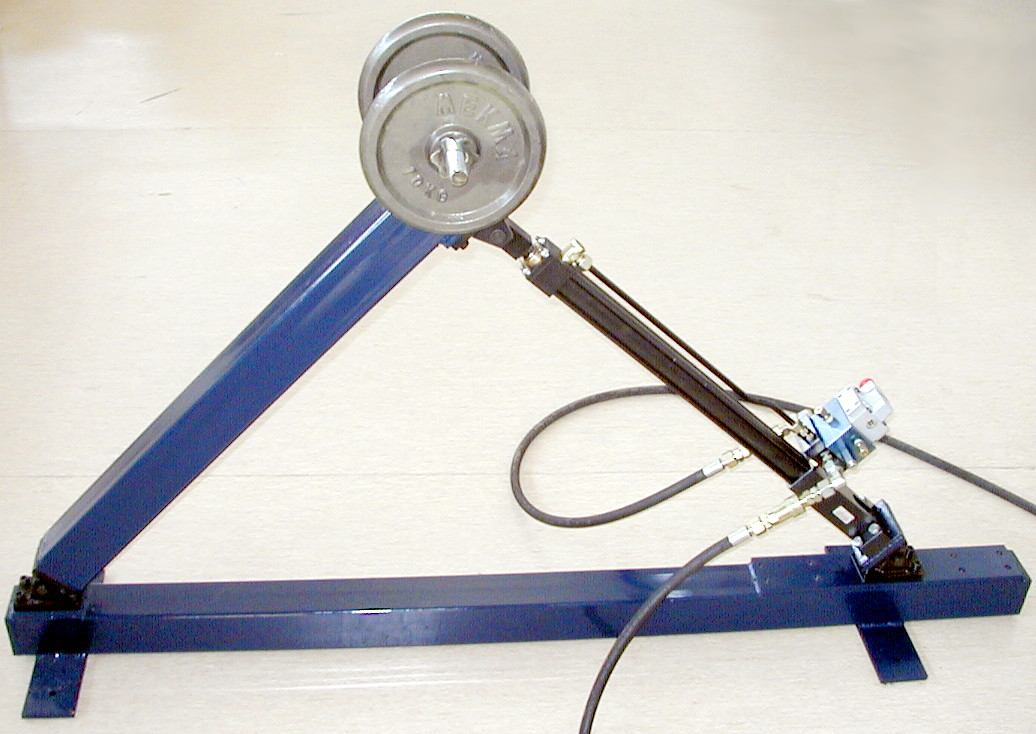
High-performance Servohydraulic Control Setup
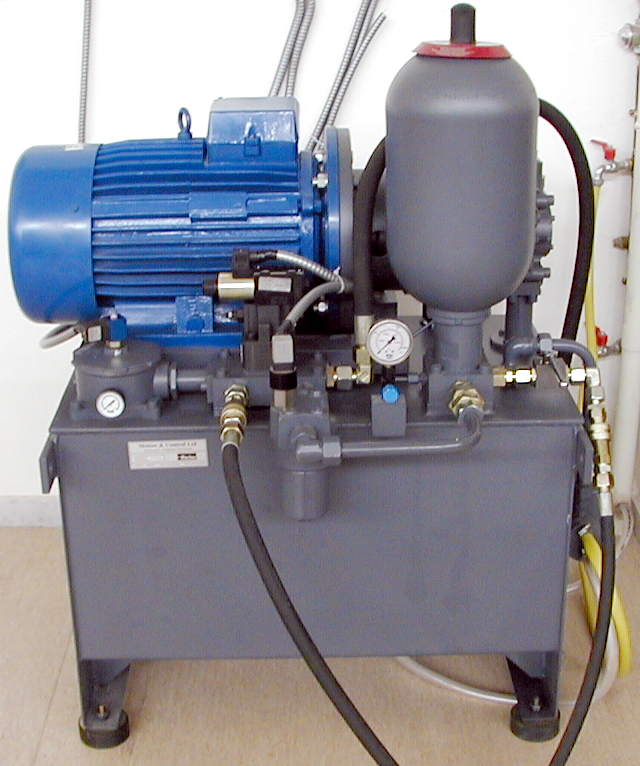
Servohydraulic System Power Supply

Robotic fish, Covered with foam in the aerodynamic tunnel for drag measurements.
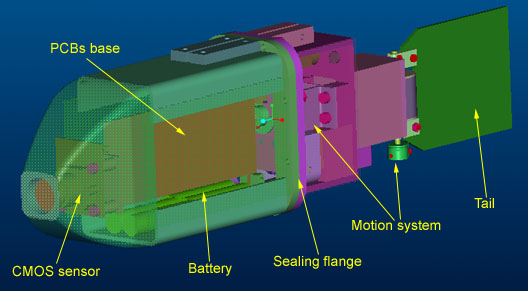
Robotic fish, CAD model
High-speed weighing prototype

IBM Scara robot
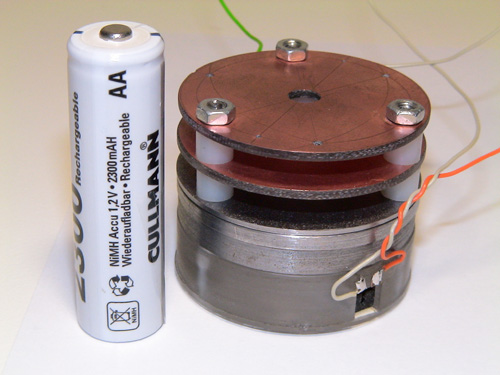
Vibration mini robot
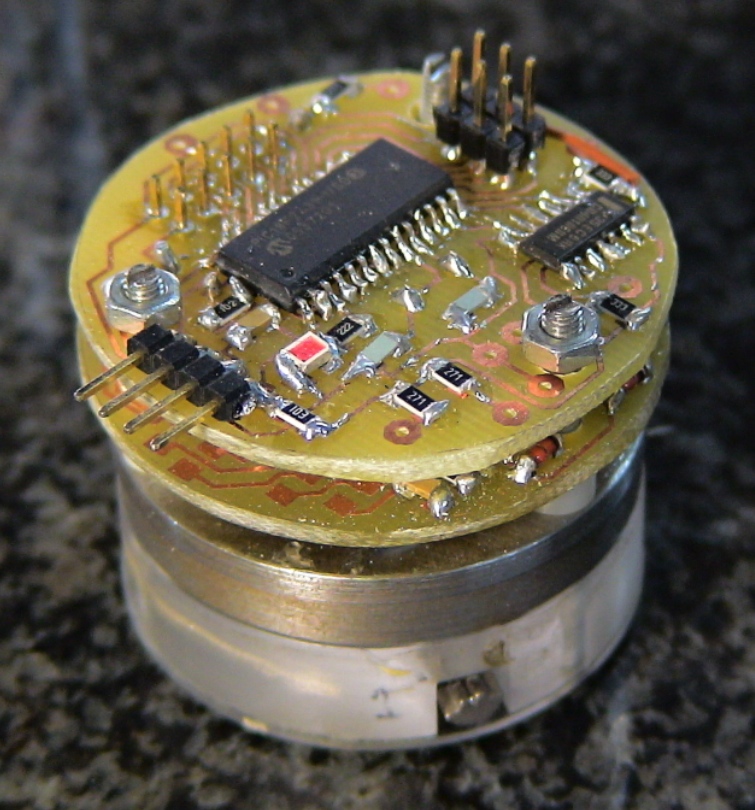
Wireless vibration mini robot
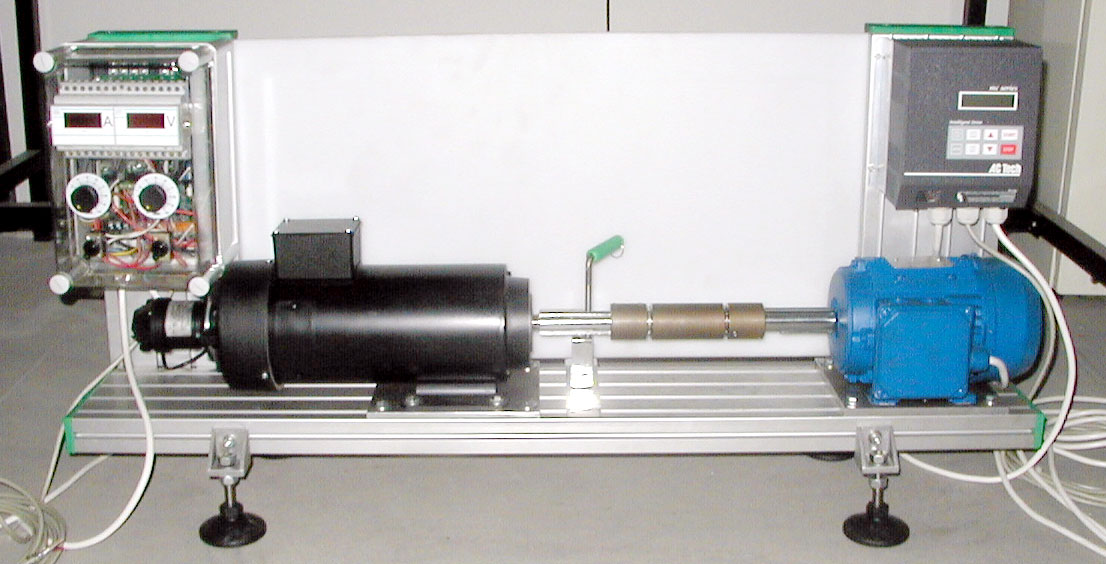
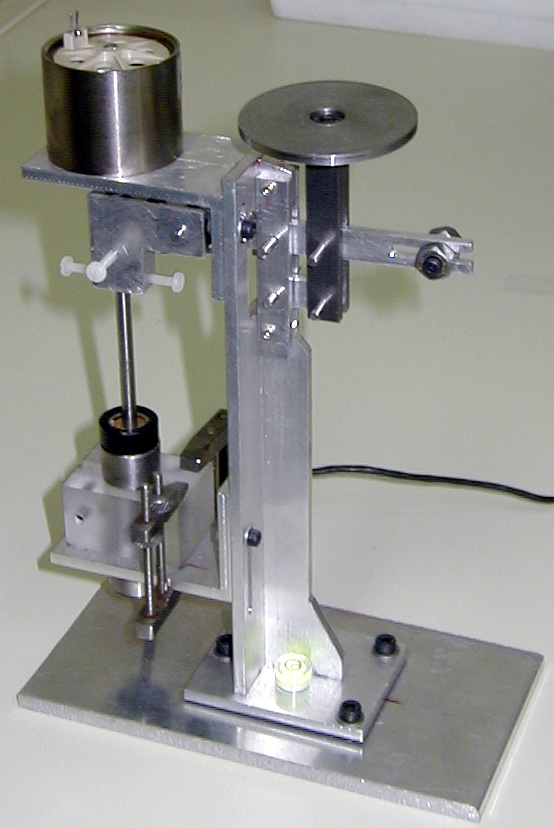
Torque-speed measurement system

Small ROV (VideoRay Pro)

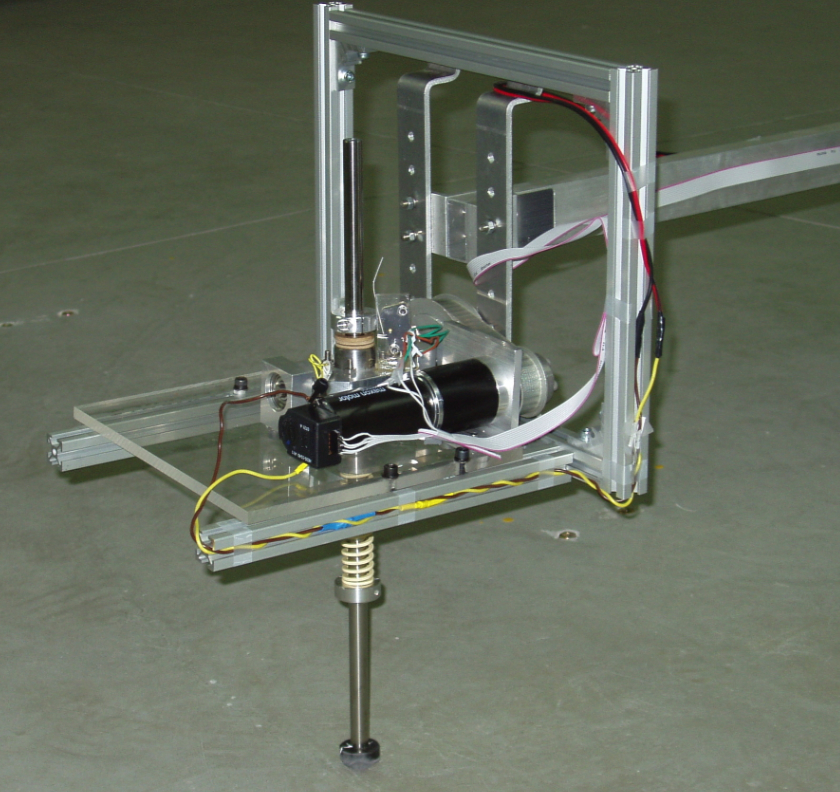
Servomechanism setup
Single leg robot